
Back to robots

 Visit website
Visit website
Video
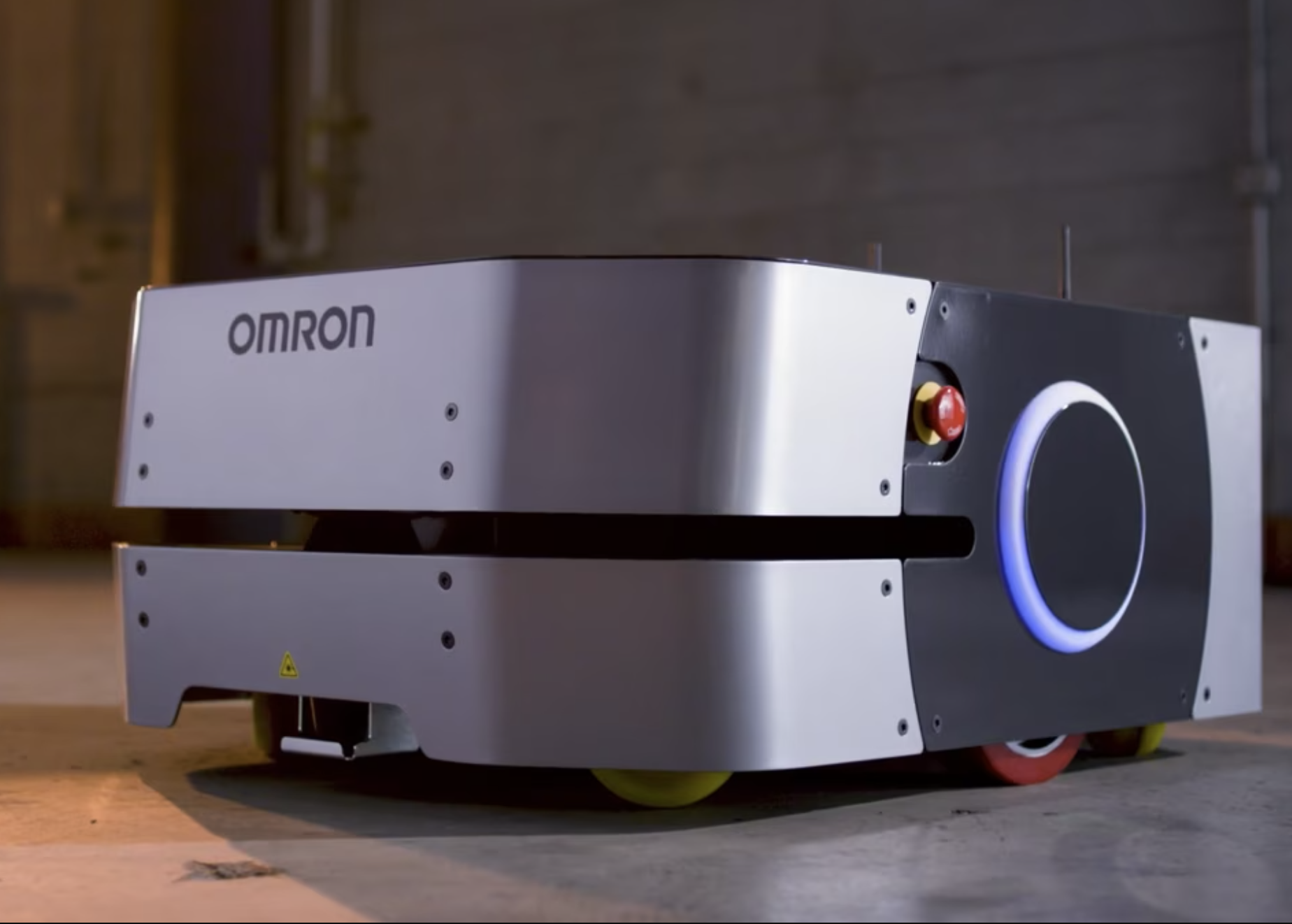
LD-250
Company: Omron Robotics
$57,191.00
Robot details
Manufacturing country
🇯🇵 Japan
Autonomy level
Fully autonomous
Status
In production
Release date
15 Nov 2019
Robot types
Mobile
Industrial
Warehouse
Primary use cases
Manufacturing
Warehousing & Logistics
About
The LD-250 is an autonomous mobile robot designed to transport loads up to 250 kg across production lines, workstations, and storage areas, using natural feature navigation and obstacle avoidance to operate safely in dynamic environments.
Specs
The LD-250 uses SLAM-based autonomous navigation without external infrastructure, supports payloads up to 250 kg, and includes safety systems such as lasers, ToF sensors, and emergency stops. It integrates with fleet management software (MobilePlanner) and enterprise systems (MES, ERP, WMS), offers precise positioning for material handling, and complies with industrial safety standards while supporting cleanroom environments and optional ESD protection.
Similar robots
-
 In production$36,230.00Viper is a six-axis industrial robot designed for high-speed, high-precision manufacturing tasks, offering flexible deployment, advanced ...
In production$36,230.00Viper is a six-axis industrial robot designed for high-speed, high-precision manufacturing tasks, offering flexible deployment, advanced ... -
 In production$41,680.00A collaborative robot designed for reliable assembly, packaging, and inspection, offering high payload capacity, integrated vision, and f...
In production$41,680.00A collaborative robot designed for reliable assembly, packaging, and inspection, offering high payload capacity, integrated vision, and f... -
 In production$30,320.00A collaborative robot designed for precision assembly, inspection, and small parts handling, featuring integrated vision, easy programmin...
In production$30,320.00A collaborative robot designed for precision assembly, inspection, and small parts handling, featuring integrated vision, easy programmin... -
 In production$48,529.00High-speed parallel (delta) robots designed to boost productivity in food, pharmaceutical, and commodity manufacturing through precise pi...
In production$48,529.00High-speed parallel (delta) robots designed to boost productivity in food, pharmaceutical, and commodity manufacturing through precise pi...





