
Back to robots

 Visit website
Visit website
Video
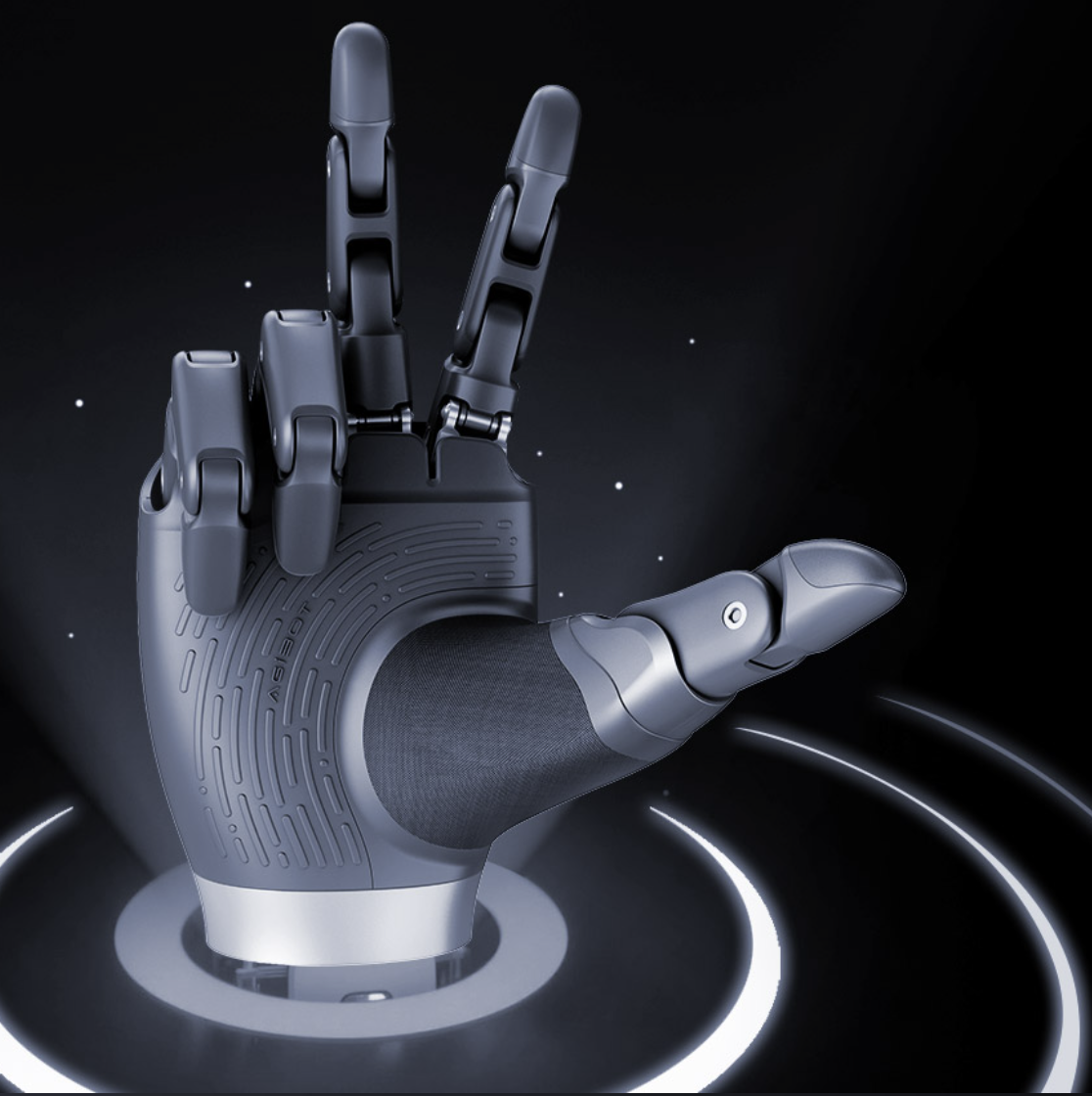
OmniHand Pro
Company: AGIBOT Innovation Technology
$12,700.00
Robot details
Manufacturing country
🇨🇳 China
Autonomy level
Teleoperated
Status
Commercially available
Release date
16 Dec 2025
Height (cm)
20
Robot types
Manipulator
Primary use cases
Warehousing & Logistics
Research
Other
About
A high-integration dexterous robotic hand with enhanced perception and human-like design, built for advanced manipulation tasks using multi-modal sensing and high degrees of freedom.
Specs
The OmniHand O12 features 12 active and 19 total degrees of freedom with a five-finger anthropomorphic design. It provides multi-modal sensing including force, position, and proximity with up to 0.01N sensitivity and over 150 tactile points. The hand delivers up to 20N fingertip force, high precision (~0.02 mm repeatability), and fast actuation (~0.8s closing time). It uses motor-driven linkage transmission, supports CAN-FD communication, and offers multiple control modes including position, force, and hybrid control for advanced manipulation tasks.
Similar robots
-
 Commercially available$20,000.00A compact, high-degree-of-freedom dexterous robotic hand designed for human-like manipulation, enabling robots to grasp, interact, and pe...
Commercially available$20,000.00A compact, high-degree-of-freedom dexterous robotic hand designed for human-like manipulation, enabling robots to grasp, interact, and pe... -
 Commercially availableAGIBOT C5 is an autonomous commercial cleaning robot designed for medium and large-scale environments, combining sweeping, scrubbing, and...
Commercially availableAGIBOT C5 is an autonomous commercial cleaning robot designed for medium and large-scale environments, combining sweeping, scrubbing, and... -
 Commercially availableAGIBOT G1 is a general-purpose embodied robot designed for large-scale data collection and model inference, supporting multi-scenario ope...
Commercially availableAGIBOT G1 is a general-purpose embodied robot designed for large-scale data collection and model inference, supporting multi-scenario ope... -
 Commercially availableAGIBOT G2 is an industrial-grade interactive embodied operation robot designed for high-precision force-controlled tasks, human-like moti...
Commercially availableAGIBOT G2 is an industrial-grade interactive embodied operation robot designed for high-precision force-controlled tasks, human-like moti...





